|
|
| BaseImageInport (std::string_view identifier, bool outportDeterminesSize) |
|
| BaseImageInport (std::string_view identifier, Document help={}, OutportDeterminesSize value=OutportDeterminesSize::No) |
| virtual std::string_view | getClassIdentifier () const override |
| virtual std::shared_ptr< const Image > | getData () const override |
| virtual Document | getInfo () const override |
| virtual std::vector< std::pair< Outport *, std::shared_ptr< const Image > > > | getSourceVectorData () const override |
| virtual std::vector< std::shared_ptr< const Image > > | getVectorData () const override |
| bool | hasData () const override |
| virtual bool | isOutportDeterminingSize () const override |
|
void | passOnDataToOutport (ImageOutport *outport) const |
| virtual void | setOutportDeterminesSize (bool outportDeterminesSize) override |
|
void | setOutportDeterminesSize (OutportDeterminesSize outportDeterminesSize) |
| virtual bool | canConnectTo (const Port *port) const override |
| virtual void | connectTo (Outport *port) override |
|
| DataInport (std::string_view identifier, Document help={}) |
| virtual uvec3 | getColorCode () const override |
| virtual DataInfo | getDataInfo () const override |
| virtual size_t | getMaxNumberOfConnections () const override |
| virtual bool | isConnected () const override |
|
virtual void | disconnectFrom (Outport *outport) |
|
virtual const std::vector< const Outport * > & | getChangedOutports () const |
|
virtual Outport * | getConnectedOutport () const |
|
const std::vector< Outport * > & | getConnectedOutports () const noexcept |
|
virtual size_t | getNumberOfConnections () const |
| virtual bool | isChanged () const |
|
virtual bool | isConnectedTo (const Outport *outport) const |
|
bool | isOptional () const |
| virtual bool | isReady () const override |
| const BaseCallBack * | onChange (std::function< void()> lambda) |
|
std::shared_ptr< std::function< void()> > | onChangeScoped (std::function< void()> lambda) |
|
const BaseCallBack * | onConnect (std::function< void()> lambda) |
|
std::shared_ptr< std::function< void()> > | onConnectScoped (std::function< void()> lambda) |
|
std::shared_ptr< std::function< void(Outport *)> > | onConnectScoped (std::function< void(Outport *)> lambda) |
|
const BaseCallBack * | onDisconnect (std::function< void()> lambda) |
|
std::shared_ptr< std::function< void()> > | onDisconnectScoped (std::function< void()> lambda) |
|
std::shared_ptr< std::function< void(Outport *)> > | onDisconnectScoped (std::function< void(Outport *)> lambda) |
| virtual void | propagateEvent (Event *event, Outport *target=nullptr) |
| void | readyUpdate () |
|
void | removeOnChange (const BaseCallBack *callback) |
|
void | removeOnConnect (const BaseCallBack *callback) |
|
void | removeOnDisconnect (const BaseCallBack *callback) |
|
void | setIsReadyUpdater (std::function< bool()> updater) |
| void | setOptional (bool optional) |
| virtual void | deserialize (Deserializer &d) override |
|
Document & | getHelp () |
| const Document & | getHelp () const |
|
const std::string & | getIdentifier () const |
|
std::string | getPath () const |
| | Get the port path i.e. <processor identifier>.<port identifier>.
|
|
void | getPath (std::pmr::string &out) const |
|
Processor * | getProcessor () const |
|
Port & | operator= (const Port &)=delete |
|
Port & | operator= (Port &&)=delete |
|
| Port (const Port &)=delete |
|
| Port (Port &&)=delete |
| virtual void | serialize (Serializer &s) const override |
|
Port & | setHelp (Document help) |
|
void | setIdentifier (const std::string &name) |
|
const_iterator | begin () const noexcept |
|
util::iter_range< const_iterator_changed > | changedAndData () const noexcept |
|
const_iterator | end () const noexcept |
|
util::iter_range< const_iterator_port > | outportAndData () const noexcept |
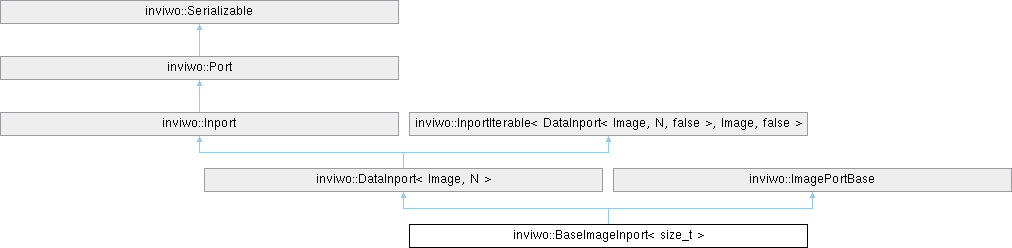
template<size_t N = 1>
class inviwo::BaseImageInport< N >
BaseImageInport extends DataInport<Image> with extra functionality for handing ResizeEvents. The following table explains the behaviors:
* ImageOutport
* isHandlingResizeEvents()
*
* True (default) False
* ┌──────────────────────────────────┬──────────────────────────────────┐
* │ Outport::Size = max(Inports │ Outport::Size = Outport::size │
* │ requested sizes) │ (no resize of data) │
* │ (resize the data in the outport │ │
* False │ if needed) │ │
* (default)│ │ │
* │ Inport::Size = Inport requested │ Inport::Size = Inport requested │
* │ size │ size │
* ImageInport │ (return a resized copy if │ (return a resized copy if │
* │ needed) │ needed) │
* isOutport- │ │ │
* Determining- ├──────────────────────────────────┼──────────────────────────────────┤
* Size() │ Outport::Size = max(all inports │ Outport::Size = Outport::Size │
* │ requested sizes) │ (no resize of data) │
* │ (resize the data in the outport │ │
* True │ if needed) │ │
* │ │ │
* │ Inport::Size = Outport::size │ Inport::Size = Outport::size │
* │ (no copy) │ (no copy) │
* │ │ │
* │ │ │
* └──────────────────────────────────┴──────────────────────────────────┘
*
- See also
- ImageOutport
-
ResizeEvent